Searching across hundreds of databases
This service exclusively searches for literature that cites resources. Please be aware that the total number of searchable documents is limited to those containing RRIDs and does not include all open-access literature.
Saccadic eye-movements play a crucial role in visuo-motor control by allowing rapid foveation onto new targets. However, the neural processes governing saccades adaptation are not fully understood. Saccades, due to the short-time of execution (20-100 ms) and the absence of sensory information for online feedback control, must be controlled in a ballistic manner. Incomplete measurements of the movement trajectory, such as the visual endpoint error, are supposedly used to form internal predictions about the movement kinematics resulting in predictive control. In order to characterize the synaptic and neural circuit mechanisms underlying predictive saccadic control, we have reconstructed the saccadic system in a digital controller embedding a spiking neural network of the cerebellum with spike timing-dependent plasticity (STDP) rules driving parallel fiber-Purkinje cell long-term potentiation and depression (LTP and LTD). This model implements a control policy based on a dual plasticity mechanism, resulting in the identification of the roles of LTP and LTD in regulating the overall quality of saccade kinematics: it turns out that LTD increases the accuracy by decreasing visual error and LTP increases the peak speed. The control policy also required cerebellar PCs to be divided into two subpopulations, characterized by burst or pause responses. To our knowledge, this is the first model that explains in mechanistic terms the visual error and peak speed regulation of ballistic eye movements in forward mode exploiting spike-timing to regulate firing in different populations of the neuronal network. This elementary model of saccades could be extended and applied to other more complex cases in which single jerks are concatenated to compose articulated and coordinated movements.
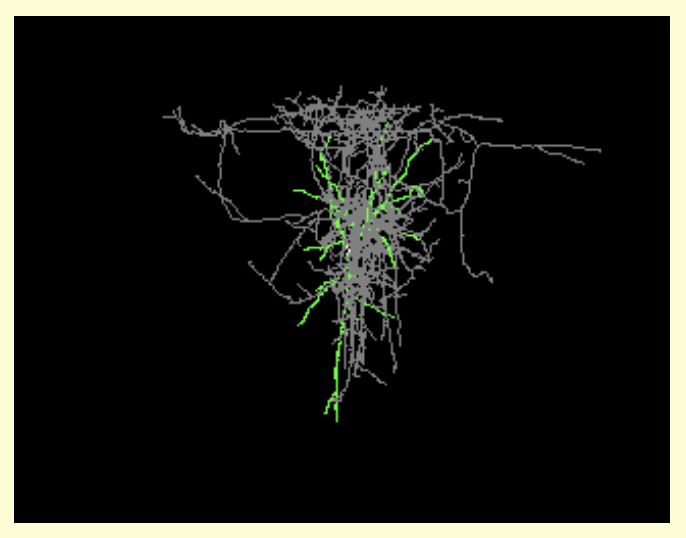
Sensorimotor signals are integrated and processed by the cerebellar circuit to predict accurate control of actions. In order to investigate how single neuron dynamics and geometrical modular connectivity affect cerebellar processing, we have built an olivocerebellar Spiking Neural Network (SNN) based on a novel simplification algorithm for single point models (Extended Generalized Leaky Integrate and Fire, EGLIF) capturing essential non-linear neuronal dynamics (e.g., pacemaking, bursting, adaptation, oscillation and resonance). EGLIF models specifically tuned for each neuron type were embedded into an olivocerebellar scaffold reproducing realistic spatial organization and physiological convergence and divergence ratios of connections. In order to emulate the circuit involved in an eye blink response to two associated stimuli, we modeled two adjacent olivocerebellar microcomplexes with a common mossy fiber input but different climbing fiber inputs (either on or off). EGLIF-SNN model simulations revealed the emergence of fundamental response properties in Purkinje cells (burst-pause) and deep nuclei cells (pause-burst) similar to those reported in vivo. The expression of these properties depended on the specific activation of climbing fibers in the microcomplexes and did not emerge with scaffold models using simplified point neurons. This result supports the importance of embedding SNNs with realistic neuronal dynamics and appropriate connectivity and anticipates the scale-up of EGLIF-SNN and the embedding of plasticity rules required to investigate cerebellar functioning at multiple scales.
The cerebellum is involved in a large number of different neural processes, especially in associative learning and in fine motor control. To develop a comprehensive theory of sensorimotor learning and control, it is crucial to determine the neural basis of coding and plasticity embedded into the cerebellar neural circuit and how they are translated into behavioral outcomes in learning paradigms. Learning has to be inferred from the interaction of an embodied system with its real environment, and the same cerebellar principles derived from cell physiology have to be able to drive a variety of tasks of different nature, calling for complex timing and movement patterns. We have coupled a realistic cerebellar spiking neural network (SNN) with a real robot and challenged it in multiple diverse sensorimotor tasks. Encoding and decoding strategies based on neuronal firing rates were applied. Adaptive motor control protocols with acquisition and extinction phases have been designed and tested, including an associative Pavlovian task (Eye blinking classical conditioning), a vestibulo-ocular task and a perturbed arm reaching task operating in closed-loop. The SNN processed in real-time mossy fiber inputs as arbitrary contextual signals, irrespective of whether they conveyed a tone, a vestibular stimulus or the position of a limb. A bidirectional long-term plasticity rule implemented at parallel fibers-Purkinje cell synapses modulated the output activity in the deep cerebellar nuclei. In all tasks, the neurorobot learned to adjust timing and gain of the motor responses by tuning its output discharge. It succeeded in reproducing how human biological systems acquire, extinguish and express knowledge of a noisy and changing world. By varying stimuli and perturbations patterns, real-time control robustness and generalizability were validated. The implicit spiking dynamics of the cerebellar model fulfill timing, prediction and learning functions.
Welcome to the FDI Lab - SciCrunch.org Resources search. From here you can search through a compilation of resources used by FDI Lab - SciCrunch.org and see how data is organized within our community.
You are currently on the Community Resources tab looking through categories and sources that FDI Lab - SciCrunch.org has compiled. You can navigate through those categories from here or change to a different tab to execute your search through. Each tab gives a different perspective on data.
If you have an account on FDI Lab - SciCrunch.org then you can log in from here to get additional features in FDI Lab - SciCrunch.org such as Collections, Saved Searches, and managing Resources.
Here is the search term that is being executed, you can type in anything you want to search for. Some tips to help searching:
You can save any searches you perform for quick access to later from here.
We recognized your search term and included synonyms and inferred terms along side your term to help get the data you are looking for.
If you are logged into FDI Lab - SciCrunch.org you can add data records to your collections to create custom spreadsheets across multiple sources of data.
Here are the facets that you can filter your papers by.
From here we'll present any options for the literature, such as exporting your current results.
If you have any further questions please check out our FAQs Page to ask questions and see our tutorials. Click this button to view this tutorial again.
Year:
Count:
The SciCrunch Infrastructure was developed as a cooperative data platform to be used by diverse communities in making data more FAIR.
 scicrunch.org
scicrunch.org