Searching across hundreds of databases
This service exclusively searches for literature that cites resources. Please be aware that the total number of searchable documents is limited to those containing RRIDs and does not include all open-access literature.
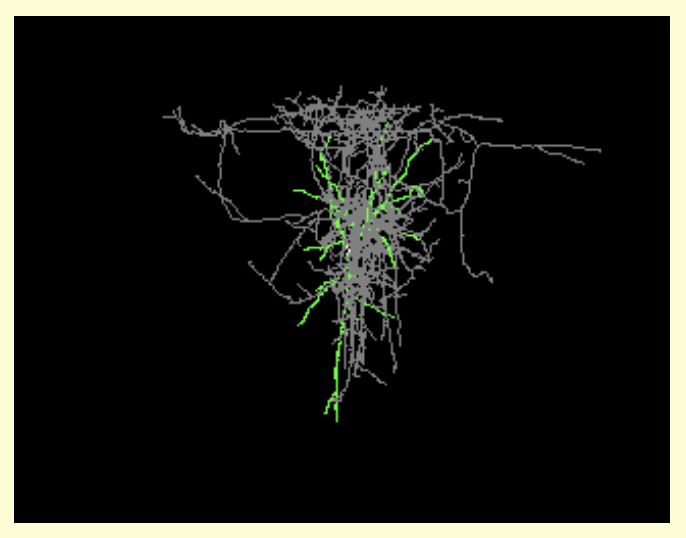
The cerebellum is involved in a large number of different neural processes, especially in associative learning and in fine motor control. To develop a comprehensive theory of sensorimotor learning and control, it is crucial to determine the neural basis of coding and plasticity embedded into the cerebellar neural circuit and how they are translated into behavioral outcomes in learning paradigms. Learning has to be inferred from the interaction of an embodied system with its real environment, and the same cerebellar principles derived from cell physiology have to be able to drive a variety of tasks of different nature, calling for complex timing and movement patterns. We have coupled a realistic cerebellar spiking neural network (SNN) with a real robot and challenged it in multiple diverse sensorimotor tasks. Encoding and decoding strategies based on neuronal firing rates were applied. Adaptive motor control protocols with acquisition and extinction phases have been designed and tested, including an associative Pavlovian task (Eye blinking classical conditioning), a vestibulo-ocular task and a perturbed arm reaching task operating in closed-loop. The SNN processed in real-time mossy fiber inputs as arbitrary contextual signals, irrespective of whether they conveyed a tone, a vestibular stimulus or the position of a limb. A bidirectional long-term plasticity rule implemented at parallel fibers-Purkinje cell synapses modulated the output activity in the deep cerebellar nuclei. In all tasks, the neurorobot learned to adjust timing and gain of the motor responses by tuning its output discharge. It succeeded in reproducing how human biological systems acquire, extinguish and express knowledge of a noisy and changing world. By varying stimuli and perturbations patterns, real-time control robustness and generalizability were validated. The implicit spiking dynamics of the cerebellar model fulfill timing, prediction and learning functions.
Modeling and simulating the neural structures which make up our central neural system is instrumental for deciphering the computational neural cues beneath. Higher levels of biological plausibility usually impose higher levels of complexity in mathematical modeling, from neural to behavioral levels. This paper focuses on overcoming the simulation problems (accuracy and performance) derived from using higher levels of mathematical complexity at a neural level. This study proposes different techniques for simulating neural models that hold incremental levels of mathematical complexity: leaky integrate-and-fire (LIF), adaptive exponential integrate-and-fire (AdEx), and Hodgkin-Huxley (HH) neural models (ranged from low to high neural complexity). The studied techniques are classified into two main families depending on how the neural-model dynamic evaluation is computed: the event-driven or the time-driven families. Whilst event-driven techniques pre-compile and store the neural dynamics within look-up tables, time-driven techniques compute the neural dynamics iteratively during the simulation time. We propose two modifications for the event-driven family: a look-up table recombination to better cope with the incremental neural complexity together with a better handling of the synchronous input activity. Regarding the time-driven family, we propose a modification in computing the neural dynamics: the bi-fixed-step integration method. This method automatically adjusts the simulation step size to better cope with the stiffness of the neural model dynamics running in CPU platforms. One version of this method is also implemented for hybrid CPU-GPU platforms. Finally, we analyze how the performance and accuracy of these modifications evolve with increasing levels of neural complexity. We also demonstrate how the proposed modifications which constitute the main contribution of this study systematically outperform the traditional event- and time-driven techniques under increasing levels of neural complexity.
Welcome to the FDI Lab - SciCrunch.org Resources search. From here you can search through a compilation of resources used by FDI Lab - SciCrunch.org and see how data is organized within our community.
You are currently on the Community Resources tab looking through categories and sources that FDI Lab - SciCrunch.org has compiled. You can navigate through those categories from here or change to a different tab to execute your search through. Each tab gives a different perspective on data.
If you have an account on FDI Lab - SciCrunch.org then you can log in from here to get additional features in FDI Lab - SciCrunch.org such as Collections, Saved Searches, and managing Resources.
Here is the search term that is being executed, you can type in anything you want to search for. Some tips to help searching:
You can save any searches you perform for quick access to later from here.
We recognized your search term and included synonyms and inferred terms along side your term to help get the data you are looking for.
If you are logged into FDI Lab - SciCrunch.org you can add data records to your collections to create custom spreadsheets across multiple sources of data.
Here are the facets that you can filter your papers by.
From here we'll present any options for the literature, such as exporting your current results.
If you have any further questions please check out our FAQs Page to ask questions and see our tutorials. Click this button to view this tutorial again.
Year:
Count:
The SciCrunch Infrastructure was developed as a cooperative data platform to be used by diverse communities in making data more FAIR.
 scicrunch.org
scicrunch.org