Searching across hundreds of databases
This service exclusively searches for literature that cites resources. Please be aware that the total number of searchable documents is limited to those containing RRIDs and does not include all open-access literature.
In a recent study, we developed a minimally actuated robot that utilizes wave-like locomotion and analyzed its kinematics. In this paper, we present an analysis of the robot's locomotion between two highly flexible surfaces. Initially, we created a simulation model of the robot between two surfaces and determined its speed and the conditions of locomotion based on the flexibility of the surface, the geometrical parameters, and the coefficient of friction for horizontal locomotion and climbing at different angles. Our findings indicate that wave locomotion is capable of consistently advancing along the surface, even when the surface is highly flexible. Next, we developed an experimental setup and conducted multiple experiments to validate the accuracy of our simulation. The results indicate an average relative difference of approximately 11% between the speed and advance ratio of the wave crawling between the two surfaces of our simulation model and the experimental results were performed using an actual robot. Lastly, we compared the wave locomotion results to those of the worm locomotion and discovered that wave locomotion outperforms worm locomotion, especially at a higher surface flexibility.
Bacteria can exploit mechanics to display remarkable plasticity in response to locally changing physical and chemical conditions. Compliant structures play a notable role in their taxis behavior, specifically for navigation inside complex and structured environments. Bioinspired mechanisms with rationally designed architectures capable of large, nonlinear deformation present opportunities for introducing autonomy into engineered small-scale devices. This work analyzes the effect of hydrodynamic forces and rheology of local surroundings on swimming at low Reynolds number, identifies the challenges and benefits of using elastohydrodynamic coupling in locomotion, and further develops a suite of machinery for building untethered microrobots with self-regulated mobility. We demonstrate that coupling the structural and magnetic properties of artificial microswimmers with the dynamic properties of the fluid leads to adaptive locomotion in the absence of on-board sensors.
Body language reading is of significance for daily life social cognition and successful social interaction, and constitutes a core component of social competence. Yet it is unclear whether our ability for body language reading is gender specific. In the present work, female and male observers had to visually recognize emotions through point-light human locomotion performed by female and male actors with different emotional expressions. For subtle emotional expressions only, males surpass females in recognition accuracy and readiness to respond to happy walking portrayed by female actors, whereas females exhibit a tendency to be better in recognition of hostile angry locomotion expressed by male actors. In contrast to widespread beliefs about female superiority in social cognition, the findings suggest that gender effects in recognition of emotions from human locomotion are modulated by emotional content of actions and opposite actor gender. In a nutshell, the study makes a further step in elucidation of gender impact on body language reading and on neurodevelopmental and psychiatric deficits in visual social cognition.
Many complex cellular processes from mitosis to cell motility depend on the ability of the cytoskeleton to generate force. Force-generating systems that act on elastic cytoskeletal elements are prone to oscillating instabilities. In this work, we have measured spontaneous shape and movement oscillations in motile fish epithelial keratocytes. In persistently polarized, fan-shaped cells, retraction of the trailing edge on one side of the cell body is out of phase with retraction on the other side, resulting in periodic lateral oscillation of the cell body. We present a physical description of keratocyte oscillation in which periodic retraction of the trailing edge is the result of elastic coupling with the leading edge. Consistent with the predictions of this model, the observed frequency of oscillation correlates with cell speed. In addition, decreasing the strength of adhesion to the substrate reduces the elastic force required for retraction, causing cells to oscillate with higher frequency at relatively lower speeds. These results demonstrate that simple elastic coupling between movement at the front of the cell and movement at the rear can generate large-scale mechanical integration of cell behavior.
Clinical observations show emergence of agitation and hyperactivity during the anesthesia induction and/or recovery period post-anesthesia. However, an animal model to illustrate this clinical phenomenon has not yet been established. We therefore set out to investigate whether sevoflurane, a commonly used anesthetic, could alter locomotion in mice during the anesthesia induction and recovery period post-anesthesia. The activity of the mice was recorded 5 minutes before, during (for 30 minutes), and 40 minutes after the administration of the anesthetic sevoflurane [1-, 1.5- and 2-fold minimum alveolar concentration] at 370 C. The total walking distance and velocity of movement were measured and quantified as the indexes of locomotion. We found that the anesthetic sevoflurane increased the locomotion of the mice during the induction period of the anesthesia. During the recovery phase after anesthesia, the mice exhibited increased locomotion for a short period of time (about 5 minutes) and then displayed a sharp decrease in mobility for up to 60 minutes following the end of anesthesia administration. The anesthetic sevoflurane did not significantly alter the food intake and body weight of the mice. Furthermore, we found that Alzheimer's disease transgenic mice exhibited a greater degree of sevoflurane-induced hyperactivity than the wild-type mice did. Our results showed that inhalation of the anesthetic sevoflurane induced an acute hyperactivity in mice, particularly among Alzheimer's disease transgenic mice. These findings from the pilot studies have established an animal model to promote further studies into postoperative emergence agitation, hyperactivity and the underlying mechanisms into these conditions.
We examine the structure of the visual motion projected on the retina during natural locomotion in real world environments. Bipedal gait generates a complex, rhythmic pattern of head translation and rotation in space, so without gaze stabilization mechanisms such as the vestibular-ocular-reflex (VOR) a walker's visually specified heading would vary dramatically throughout the gait cycle. The act of fixation on stable points in the environment nulls image motion at the fovea, resulting in stable patterns of outflow on the retinae centered on the point of fixation. These outflowing patterns retain a higher order structure that is informative about the stabilized trajectory of the eye through space. We measure this structure by applying the curl and divergence operations on the retinal flow velocity vector fields and found features that may be valuable for the control of locomotion. In particular, the sign and magnitude of foveal curl in retinal flow specifies the body's trajectory relative to the gaze point, while the point of maximum divergence in the retinal flow field specifies the walker's instantaneous overground velocity/momentum vector in retinotopic coordinates. Assuming that walkers can determine the body position relative to gaze direction, these time-varying retinotopic cues for the body's momentum could provide a visual control signal for locomotion over complex terrain. In contrast, the temporal variation of the eye-movement-free, head-centered flow fields is large enough to be problematic for use in steering towards a goal. Consideration of optic flow in the context of real-world locomotion therefore suggests a re-evaluation of the role of optic flow in the control of action during natural behavior.
This paper describes a locomotion strategy for robots based on the interaction between two fluids, through the development of an untethered mobile robot. The fundamental principle of robot locomotion is to exploit the active deformations of ferrofluid caused by internal magnetic fields, which generate reaction forces to the surrounding fluid (in this study, water). The developed robot is equipped with two permanent magnets (PMs), two electromagnets (EMs), two clusters of ferrofluid, and a control unit with batteries. It has a length, width, and mass of 107 mm, 94 mm, and 127 g, respectively. In the robot, PMs are used to hold clusters of ferrofluid. The activation of EMs by the controller achieves forward and rotational movements of the robot. Experimental results show the forward speed and rotational speed in water to be 2.7 mm/s (at a driving frequency of 9 Hz) and 1.2°/s (at a driving frequency of 7 Hz), respectively. The measured thrust force of the robot is 2 mN, further supporting the concept of robot locomotion by fluid-fluid interaction.
The examination of gaits and gait changes has been the focus of movement physiology and legged robot engineering since the first emergence of the fields. While most examinations have focused on bipedal and quadrupedal designs, many robotic implementations rely on the higher static stability of three or more pairs of legs. Thus far, however, the effect of number of pairs of legs on locomotion dynamics has not been examined. Accordingly, the present approach aims to extend available theory to polypedal designs and examines how the number of active walking legs affects body dynamics when combined with changing duty factors and phase relations. The model shows that ground force interference of higher numbers of active pairs of walking legs can prevent effective use of bouncing gaits, such as trot, and their associated advantages, such as energy efficiency, because significantly higher degrees of leg synchronization are required. It also shows that small changes in the leg coordination pattern have a much higher impact on the center-of-mass dynamics in locomotor systems with many legs than in those with fewer legs. In this way, the model reveals coordinative constraints for specific gaits facilitating the assessment of animal locomotion and economization of robotic locomotion.
Walking through an environment generates retinal motion, which humans rely on to perform a variety of visual tasks. Retinal motion patterns are determined by an interconnected set of factors, including gaze location, gaze stabilization, the structure of the environment, and the walker's goals. The characteristics of these motion signals have important consequences for neural organization and behavior. However, to date, there are no empirical in situ measurements of how combined eye and body movements interact with real 3D environments to shape the statistics of retinal motion signals. Here, we collect measurements of the eyes, the body, and the 3D environment during locomotion. We describe properties of the resulting retinal motion patterns. We explain how these patterns are shaped by gaze location in the world, as well as by behavior, and how they may provide a template for the way motion sensitivity and receptive field properties vary across the visual field.
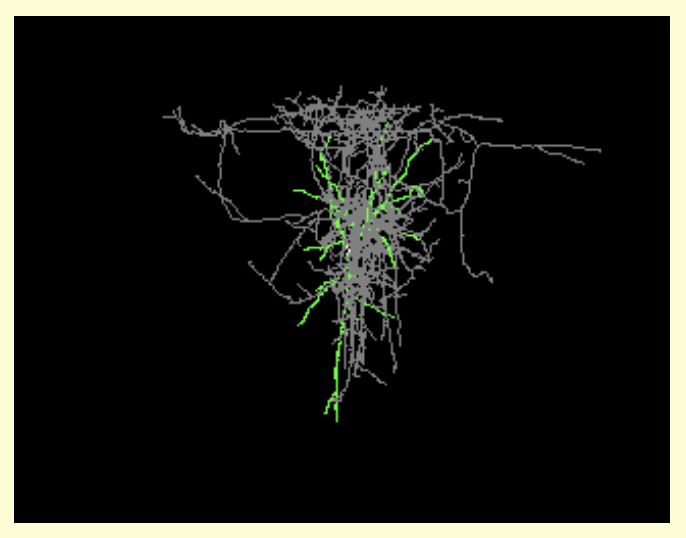
The trigeminal sensory innervation of the cranial meninges is thought to serve a nociceptive function and mediate headache pain. However, the activity of meningeal afferents under natural conditions in awake animals remains unexplored. Here, we used two- and three-dimensional two-photon calcium imaging to track the activity of meningeal afferent fibers in awake mice. Surprisingly, a large subset of afferents was activated during non-noxious conditions such as locomotion. We estimated locomotion-related meningeal deformations and found afferents with distinct dynamics and tuning to various levels of meningeal expansion, compression, shearing, and Z-axis motion. Further, these mechanosensitive afferents were often tuned to distinct directions of meningeal expansion or compression. Thus, in addition to their role in headache-related pain, meningeal sensory neurons track the dynamic mechanical state of the meninges under natural conditions.
Movement flexibility and automaticity are necessary to successfully navigate different environments. When encountering difficult terrains such as a muddy trail, we can change how we step almost immediately so that we can continue walking. This flexibility comes at a cost since we initially must pay deliberate attention to how we are moving. Gradually, after a few minutes on the trail, stepping becomes automatic so that we do not need to think about our movements. Canonical theory indicates that different adaptive motor learning mechanisms confer these essential properties to movement: explicit control confers flexibility, while forward model recalibration confers automaticity. Here we uncover a distinct mechanism of treadmill walking adaptation - an automatic stimulus-response mapping - that confers both properties to movement. The mechanism is flexible as it learns stepping patterns that can be rapidly changed to suit a range of treadmill configurations. It is also automatic as it can operate without deliberate control or explicit awareness by the participants. Our findings reveal a tandem architecture of forward model recalibration and automatic stimulus-response mapping mechanisms for walking, reconciling different findings of motor adaptation and perceptual realignment.
Locomotion occurs sporadically and needs to be started, maintained, and stopped. The neural substrate underlying the activation of locomotion is partly known, but little is known about mechanisms involved in termination of locomotion. Recently, reticulospinal neurons (stop cells) were found to play a crucial role in stopping locomotion in the lamprey: their activation halts ongoing locomotion and their inactivation slows down the termination process. Intracellular recordings of these cells revealed a distinct activity pattern, with a burst of action potentials at the beginning of a locomotor bout and one at the end (termination burst). The termination burst was shown to be time linked to the end of locomotion, but the mechanisms by which it is triggered have remained unknown. We studied this in larval sea lampreys (Petromyzon marinus; the sex of the animals was not taken into account). We found that the mesencephalic locomotor region (MLR), which is known to initiate and control locomotion, stops ongoing locomotion by providing synaptic inputs that trigger the termination burst in stop cells. When locomotion is elicited by MLR stimulation, a second MLR stimulation stops the locomotor bout if it is of lower intensity than the initial stimulation. This occurs for MLR-induced, sensory-evoked, and spontaneous locomotion. Furthermore, we show that glutamatergic and, most likely, monosynaptic projections from the MLR activate stop cells during locomotion. Therefore, activation of the MLR not only initiates locomotion, but can also control the end of a locomotor bout. These results provide new insights onto the neural mechanisms responsible for stopping locomotion.SIGNIFICANCE STATEMENT The mesencephalic locomotor region (MLR) is a brainstem region well known to initiate and control locomotion. Since its discovery in cats in the 1960s, the MLR has been identified in all vertebrate species tested from lampreys to humans. We now demonstrate that stimulation of the MLR not only activates locomotion, but can also stop it. This is achieved through a descending glutamatergic signal, most likely monosynaptic, from the MLR to the reticular formation that activates reticulospinal stop cells. Together, our findings have uncovered a neural mechanism for stopping locomotion and bring new insights into the function of the MLR.
The joint activity of neural populations is high dimensional and complex. One strategy for reaching a tractable understanding of circuit function is to seek the simplest dynamical system that can account for the population activity. By imaging Aplysia's pedal ganglion during fictive locomotion, here we show that its population-wide activity arises from a low-dimensional spiral attractor. Evoking locomotion moved the population into a low-dimensional, periodic, decaying orbit - a spiral - in which it behaved as a true attractor, converging to the same orbit when evoked, and returning to that orbit after transient perturbation. We found the same attractor in every preparation, and could predict motor output directly from its orbit, yet individual neurons' participation changed across consecutive locomotion bouts. From these results, we propose that only the low-dimensional dynamics for movement control, and not the high-dimensional population activity, are consistent within and between nervous systems.
Visual guidance is often critical during locomotion. To understand how the visual system performs this function it is necessary to know what pattern of retinal image motion neurons experience. If a locomoting observer maintains an angle of gaze that is constant relative to his body, retinal image motion will resemble Gibson's (The Perception of the Visual World (1950)) well-known optic flow field. However, if a moving observer fixates and tracks a stationary feature of the environment, or shifts his gaze, retinal motion will be quite different. We have investigated gaze in cats during visually-guided locomotion. Because cats generally maintain their eyes centered in the orbits, their gaze can be monitored with reasonable accuracy by monitoring head position. Using a digital videocamera, we recorded head position in cats as they walked down a cluttered alley. For much of the time, cats maintained a downward angle of gaze that was constant relative to their body coordinates; these episodes averaged 240 ms in duration and occupied 48-71% of the total trial time. Constant gaze episodes were separated by gaze shifts, which often coincided with blinks. Only rarely did we observe instances when cats appeared to fixate and track stationary features of the alley. We hypothesize that walking cats acquire visual information primarily during episodes of constant gaze, when retinal image motion resembles Gibson's conventional optic flow field.
Cocaine, a potent addictive substance, is an inhibitor of monoamine transporters, including DAT (dopamine transporter), SERT (serotonin transporter) and NET (norepinephrine transporter). Cocaine administration induces complex behavioral alterations in mammals, but the underlying mechanisms are not well understood. Here, we tested the effect of cocaine on C. elegans behavior. We show for the first time that acute cocaine treatment evokes changes in C. elegans locomotor activity. Interestingly, the neurotransmitter serotonin, rather than dopamine, is required for cocaine response in C. elegans. The C. elegans SERT MOD-5 is essential for the effect of cocaine, consistent with the role of cocaine in targeting monoamine transporters. We further show that the behavioral response to cocaine is primarily mediated by the ionotropic serotonin receptor MOD-1. Thus, cocaine modulates locomotion behavior in C. elegans primarily by impinging on its serotoninergic system.
Microcatheters have enabled diverse minimally invasive endovascular operations and notable health benefits compared with open surgeries. However, with tortuous routes far from the arterial puncture site, the distal vascular regions remain challenging for safe catheter access. Therefore, we propose a wireless stent-shaped magnetic soft robot to be deployed, actively navigated, used for medical functions, and retrieved in the example M4 segment of the middle cerebral artery. We investigate shape-adaptively controlled locomotion in phantoms emulating the physiological conditions here, where the lumen diameter shrinks from 1.5 mm to 1 mm, the radius of curvature of the tortuous lumen gets as small as 3 mm, the lumen bifurcation angle goes up to 120°, and the pulsatile flow speed reaches up to 26 cm/s. The robot can also withstand the flow when the magnetic actuation is turned off. These locomotion capabilities are confirmed in porcine arteries ex vivo. Furthermore, variants of the robot could release the tissue plasminogen activator on-demand locally for thrombolysis and function as flow diverters, initiating promising therapies towards acute ischemic stroke, aneurysm, arteriovenous malformation, dural arteriovenous fistulas, and brain tumors. These functions should facilitate the robot's usage in new distal endovascular operations.
Music-based therapy for rehabilitation induces neuromodulation at the brain level and improves the functional recovery. In line with this, musical rhythmicity improves post-stroke gait. Moreover, an external distractor also helps stroke patients to improve locomotion. We raised the question whether music with irregular tempo (arrhythmic music), and its possible influence on attention would induce neuromodulation and improve the post-stroke gait. We tested music-induced neuromodulation at the level of a propriospinal reflex, known to be particularly involved in the control of stabilized locomotion; after stroke, the reflex is enhanced on the hemiparetic side. The study was conducted in 12 post-stroke patients and 12 controls. Quadriceps EMG was conditioned by electrical stimulation of the common peroneal nerve, which produces a biphasic facilitation on EMG, reflecting the level of activity of the propriospinal reflex between ankle dorsiflexors and quadriceps (CPQ reflex). The CPQ reflex was tested during treadmill locomotion at the preferred speed of each individual, in 3 conditions randomly alternated: without music vs. 2 arrhythmic music tracks, including a pleasant melody and unpleasant aleatory electronic sounds (AES); biomechanical and physiological parameters were also investigated. The CPQ reflex was significantly larger in patients during walking without sound, compared to controls. During walking with music, irrespective of the theme, there was no more difference between groups. In controls, music had no influence on the size of CPQ reflex. In patients, CPQ reflex was significantly larger during walking without sound than when listening to the melody or AES. No significant differences have been revealed concerning the biomechanical and the physiological parameters in both groups. Arrhythmic music listening modulates the spinal excitability during post-stroke walking, restoring the CPQ reflex activity to normality. The plasticity was not accompanied by any clear improvement of gait parameters, but the patients reported to prefer walking with music than without. The role of music as external focus of attention is discussed. This study has shown that music can modulate propriospinal neural network particularly involved in the gait control during the first training session. It is speculated that repetition may help to consolidate plasticity and would contribute to gait recovery after stroke.
The primary aim of our feasibility reporting was to define physiological differences in trail running (TR) athletes due to different uphill locomotion patterns, uphill running versus uphill walking. In this context, a feasibility analysis of TR athletes' cardiopulmonary exercise testing (CPET) data, which were obtained in summer 2020 at the accompanying sports medicine performance center, was performed. Fourteen TR athletes (n = 14, male = 10, female = 4, age: 36.8 ± 8.0 years) were evaluated for specific physiological demands by outdoor CPET during a short uphill TR performance. The obtained data of the participating TR athletes were compared for anthropometric data, CPET parameters, such as V˙Emaximum, V˙O2maximum, maximal breath frequency (BFmax) and peak oxygen pulse as well as energetic demands, i.e., the energy cost of running (Cr). All participating TR athletes showed excellent performance data, whereby across both different uphill locomotion strategies, significant differences were solely revealed for V˙Emaximum (p = 0.033) and time to reach mountain peak (p = 0.008). These results provide new insights and might contribute to a comprehensive understanding of cardiorespiratory consequences to short uphill locomotion strategy in TR athletes and might strengthen further scientific research in this field.
In the brain, increased neural activity is correlated with increases of cerebral blood flow and tissue oxygenation. However, how cerebral oxygen dynamics are controlled in the behaving animal remains unclear. We investigated to what extent cerebral oxygenation varies during locomotion. We measured oxygen levels in the cortex of awake, head-fixed mice during locomotion using polarography, spectroscopy, and two-photon phosphorescence lifetime measurements of oxygen sensors. We find that locomotion significantly and globally increases cerebral oxygenation, specifically in areas involved in locomotion, as well as in the frontal cortex and the olfactory bulb. The oxygenation increase persists when neural activity and functional hyperemia are blocked, occurred both in the tissue and in arteries feeding the brain, and is tightly correlated with respiration rate and the phase of respiration cycle. Thus, breathing rate is a key modulator of cerebral oxygenation and should be monitored during hemodynamic imaging, such as in BOLD fMRI.
To maintain proper locomotive patterns, animals constantly monitor body posture with their proprioceptive receptors. In Drosophila, the chordotonal organs (Cho) are especially important in the regulation of locomotion pattern. However, how Cho neurons that are normally activated with sound (vibration) transduce static displacement caused by body position change remains unclear. Here, we report that piezo-like (pzl), a homolog for mammalian piezo1 and 2, is essential for Cho's function in locomotion. The mutant allele of pzl showed severe defects in crawling pattern and body gesture control, which were rescued by expressing Pzl specifically in Cho neurons. The ability of Cho neurons to respond to micrometer-scale body wall displacement requires pzl. Intriguingly, human or mouse Piezo1 can rescue pzl-mutant phenotypes, suggesting a conserved role of the Piezo-family proteins in locomotion.
Welcome to the FDI Lab - SciCrunch.org Resources search. From here you can search through a compilation of resources used by FDI Lab - SciCrunch.org and see how data is organized within our community.
You are currently on the Community Resources tab looking through categories and sources that FDI Lab - SciCrunch.org has compiled. You can navigate through those categories from here or change to a different tab to execute your search through. Each tab gives a different perspective on data.
If you have an account on FDI Lab - SciCrunch.org then you can log in from here to get additional features in FDI Lab - SciCrunch.org such as Collections, Saved Searches, and managing Resources.
Here is the search term that is being executed, you can type in anything you want to search for. Some tips to help searching:
You can save any searches you perform for quick access to later from here.
We recognized your search term and included synonyms and inferred terms along side your term to help get the data you are looking for.
If you are logged into FDI Lab - SciCrunch.org you can add data records to your collections to create custom spreadsheets across multiple sources of data.
Here are the facets that you can filter your papers by.
From here we'll present any options for the literature, such as exporting your current results.
If you have any further questions please check out our FAQs Page to ask questions and see our tutorials. Click this button to view this tutorial again.
Year:
Count:
The SciCrunch Infrastructure was developed as a cooperative data platform to be used by diverse communities in making data more FAIR.
 scicrunch.org
scicrunch.org